
| Технические параметры Электроника прибора Результаты полученные на P47-SPM-MDT |
|
Модель Solver P47-SPM-MDT является продуктом развития прибора Solver P4-SPM-MDT. Общая идея микроскопа, заключающаяся в блочности конструкции, каторая сохранена. Прибор имеет мощный электронный блок, смонтированный в основании прибора, может работать с различными типами сканеров и головок. В отличии от прибора Solver P4-SPM-MDT, где сканирование осуществлялось только образцом, в конструкции нового прибора заложена возможность реализации конфигурации ╚сканирование кантилевером╩. При этом возможно исследовать образцы значительно больших размеров без искажения резонансных характеристик сканера. Solver P47-SPM-MDT использует базовую электронику, обеспечивающую возможность работы в мультимодовом режиме. Электроника допускает использование одного или нескольких цифровых сигнальных процессоров типа ADSP-2181, применение которых позволяет лучше работать прибору в многозадачной среде WINDOWS-95,98, а также обеспечивает |  Внешний вид прибора Solver P47-SPM-MDT |
| возможность работы в сетевом режиме, разгружая машину от выполнения рутинных операций. При этом одной из основных задач процессора является выполнение сложных режимов сканирования и позволяет осуществить коррекцию не идеальности керамики с точностью лучшей десятой доли процента. При использовании одного сигнального процессора функции обратной связи лучше оставлять электронике. |
 a |  б |
|
Для регистрации отклонения кантилевера мы применили оптико-позиционную схему. При сканировании кантилевером появляется необходимость в специальной системе слежения за позиционированием лазера на кантилевер в процессе сканирования. Система регистрации должна быть выполнена так, что если при сканировании изгиба кантилевера не происходит, луч отраженного от сканирующего кантилевера лазерного света должен оставаться в перекрестье регистрирующего фотодиода. Решение этой задачи получено закреплением специальной системы зеркал на сканере. При этом используется неподвижные во время измерения лазер и фотодиод. Юстировка регистрирующей системы обеспечивается четырьмя микрометрическими подвижками.
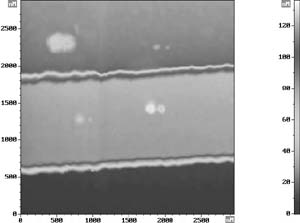
Система грубого подвода выполнена с использованием шагового двигателя с 200 шагами на 360°. Каждый шаг разбивается на 64 подшага, что обеспечивает минимальный единичный сдвиг около 25нм, что много меньше величины диапазона по Z (не менее 1.5мкм). Конструкция системы сближения выполнена так, что обеспечивается возврат на место предыдущего сканирования с точностью до 0.1 мкм при выполнении многих циклов сближения - отвода, в том числе и с жидкостной ячейкой. Это обеспечивает возможность проведения длительных (многодневных) экспериментов. Последнее позволяет изучать процессы коррозии, старения, жизнедеятельности клеток и т.д.. Ниже приведено АСМ изображение дифракционной решетки после первого (а) и 10 циклов (б) операций сближения образец - кантилевер, а на (в) приведена разность этих изображений. Образец отводился за каждый цикл на фиксированное расстояние 1 мм. Из сравнения видно, что относительное смещение изображений находится в пределе 0.1 мкм, что подтверждает высокое качество механизма подвода, гарантирующее возможность длительных наблюдений объекта. |
 a | 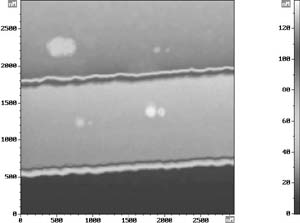 б |
|
в | г |
|
Управление прибором осуществляется программно через электронный блок при помощи рабочей станции на базе IBM - совместимого компьютера со специальным программным обеспечением. В настоящее время используется компьютер с процессором Pentium 200, 2Gbyte HD, 32Mbyte RAM. Для управления прибором используется специально разработанный, универсальный электронный блок High-Q с большими возможностями для осуществления различных мод работы прибора.
Электроника и программное обеспечение прибора позволяют работать в следующих модах:
Эти моды работы в СЗМ Solver P47-SPM-MDT могут быть реализованы с применением двух головок: |
 Головка для сканирования образцом | Головка для сканирования кантилевером |
| В модах сканирующей туннельной микроскопии и спектроскопии: |
 а |  б |
| Для резонансной моды латеральных сил (Sear Force) с возможностью регистрации дополнительного сигнала (например оптического (SNOM) или токового): |

| Прибор имеет герметичную газово-жидкостную ячейку и электрохимическую ячейку для работы в том числе и в режиме атомно-силового микроскопа. |
|
Прибор позволяет работать с герметичной газовой и жидкостной ячейках с возможностью изменения состава среды в процессе эксперимента, имеется возможность работы в электрохимической ячейке в атомно-силовом и туннельном режимах. Прибор может быть снабжен видеокамерой, облегчающей возможность позиционирования. Разрешение зависит от типа видеокамеры и может быть в пределах 1 - 2 микрон.
|
|